1802077****

更新时间:2025-06-14


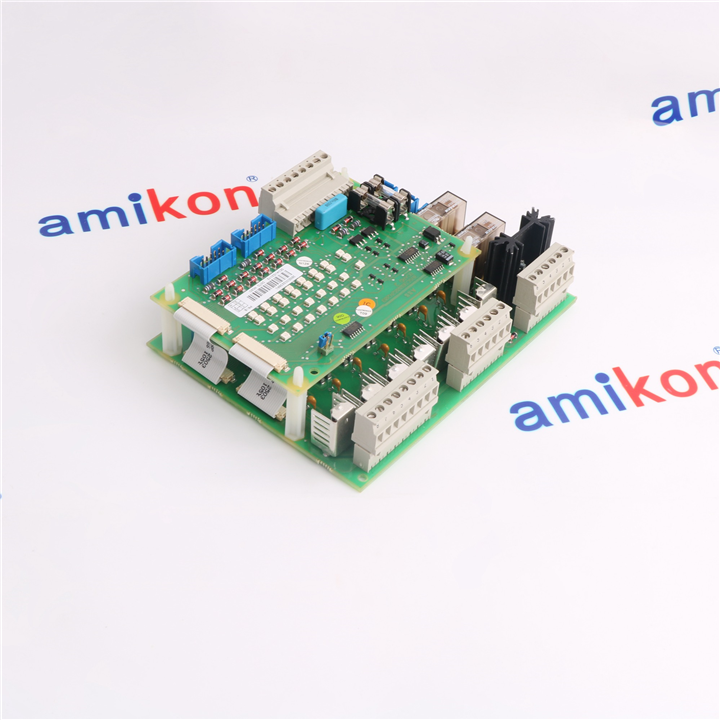
描述:
速度模式,转矩是自由的(随负载变)通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。速度模式相对位置模式相对应,位置信号存在误差,位置模式的信号由终端负载检测装置提供,减少中间传动误差,相对增加了整个系统的定位精度。我们速度控制模式主要采用的是0-10电压信号来控制电机转速,模拟量幅值的大小决定了给定速度的大小,正负决定电机应关系取决于速度指令增益,在负载惯量大的场合使用速度模式,我们需要设定速度环增益,让系统响应更迅速。调整时需要兼顾设备的振动,不能因为响应速度而产生系统振动。BaldorRelianceIDNM3538.5HP3Phase230/460VAC1725RPM56CMotor(VT)BALDORRELIANCEM1221T/14B0040N021-1/2-.67HPINDUSTRIALMOTOR183704BALDORRELIANCEM1221T/14B0040N021-1/2-.67HPINDUSTRIALMOTOR183704BaldorRe
上一个:英维斯3805E
下一个:ABBSPBR**10